




こんな悩みはありませんか?
- ドローンの免許制度が始まるけど、どんな試験なのだろう?
- 免許制度に備えて、実技の内容を知りたい、訓練しておきたい
- 実技に不安があるから予め知りたい、予習しておきたい
本記事で紹介する「ドローンの免許の試験内容とは?1等ライセンスの実地試験についてご紹介します。」を読むと免許制度の実地試験の内容が理解できます。ぜひ最後までご覧ください。
実地試験とは、ドローンを使って行う試験のことです。
ドローンの免許制度とは?
ドローンの免許制度は以下の問題を解決することを目的として創設されます。
- 有人地帯(第3者上空)の目視外飛行を補助者なしで行えるようにする(レベル4、カテゴリー3)
- 第3者上空を安全に飛行するための仕組みを厳格に構築
- 便利にドローンを活用するために規制の合理化と簡略化
特に有人地帯での補助者なし目視外飛行はレベル4やカテゴリー3と呼ばれています。
レベル4、カテゴリー3に加えて第3者上空で安全に飛行を行うため、機体の認証制度も定められます。
またドローンをさらに便利に活用できるよう、規制の合理化や簡略化が行われる予定です。
免許制度には1等ライセンスと2等ライセンスの2つがあります。正式名称は以下です。
- 1等ライセンスは一等無人航空機操縦士
- 2等ライセンスは二等無人航空機操縦士
1等ライセンスは前述したレベル4、カテゴリー3飛行を目的とした免許です。
2等ライセンスではレベル4、カテゴリー3飛行は行えません。
2等ライセンスは、現在の法規制では国交省への許可・承認が必要だった飛行態様で条件を満たせば許可・承認が必要なくなります。
当然1等ライセンスは2等ライセンスの内容も網羅しています。
1等ライセンスは2等ライセンスと比較して、講習時間の長時間化や試験難易度も上がるため、ご自身の目的にあったライセンスを選ぶとよいでしょう。
ドローンの免許制度や講習時間については以下の記事で詳しく解説していますのでご参照ください。
免許制度の限定変更とは?試験が複数ある?
免許制度には限定されている項目があります。
具体的には、「基本となる免許を取得したのみでは認められない飛行態様がある」ということです。限定されている項目には以下の3つがあります。
- 夜間飛行
- 目視外飛行
- 総重量25kg以上の機体の操縦
既存の法規制でも制限されている内容です。
基本的な免許の取得だけなら、「昼間飛行と目視内飛行を総重量25kg未満の機体で行う」ことしか認められません。
ですから1等ライセンスを取得する際も、基本の免許だけでは目視外飛行を行えないということです。
3つの飛行態様で、飛行を行うためにはそれぞれの講習をうけて試験に合格する必要があります。このことを限定変更と言います。
このように実地試験(修了審査)には、基本の試験、目視外飛行の試験、夜間飛行の試験、総重量25kg以上の機体の試験があります。
1等ライセンスと2等ライセンスのどちらも4つの試験があります。
特に目視外飛行は頻繁に行う方も多いので、事前に取得しておくのがよいのではないでしょうか。
免許制度の3つの区分
自動車の運転免許に大型や中型などがあるように、ドローンの免許制度にも3つの区分があります。
- 回転翼航空機(マルチローター)
- 回転翼航空機(ヘリコプター)
- 飛行機
ここまでドローンの免許制度の概要と限定変更についてご紹介しました。ここからは具体的な試験内容をご紹介していきます。
実地試験(修了審査)の内容とは?
前述したようにドローンの免許制度には2つのライセンスがあり、3つの限定された項目があります。これに基本を加えた4つの試験が存在します。
実技試験の種類
1等ライセンス
- 基本
- 夜間飛行
- 目視外飛行
- 総重量25kg以上の機体
2等ライセンス
- 基本
- 夜間飛行
- 目視外飛行
- 総重量25kg以上の機体
それぞれの実地試験は以下のように構成されています。
- 机上試験
- 口述試験(飛行前点検)
- 実技試験
- 口述、机上試験(飛行前の点検及び記録)
- 口述試験(事故、重大インシデントの報告及びその対応)
ここまで実地試験の概要をご紹介しました。ここからは免許制度の基準の1つとなっている立入管理措置についてご紹介します。
知っておきたい立入管理措置
立入管理措置とは現在の法規制と整合性をとるため、国土交通省が定めたものです。
- 補助者を配置し注意喚起を行い第3者への衝突回避策を講じる
- 第3者の立入を管理する区域を設定する
- 第3者の立入を禁止する区域を設定する
2は立入管理区画ともよばれ人口集中地区以外における補助者なしでの目視外飛行や物件投下を行う際に求められています。
3は立入禁止区画でイベント上空の飛行の際に求められています。
これらをまとめて立入管理措置と呼びます。
従来は個別に設定されていたものを整合性をとり、新しく定めたものとなります。
ここからは実地試験の内容を具体的にご紹介していきます。2022年9月現在、以下は確定した内容ではありませんのでご了承ください。
1等ライセンス基本に係る実地試験
基本の試験は限定変更がない試験です。名前の通り、最も基本となる試験です。
立入管理措置なしで昼間に目視内飛行を安全に行うための知識と能力があるか試験を通じて確認されます。
自動操縦については、適切な飛行経路の設定や危機回避機能(フェールセーフ機能)の設定を行うために十分な知識があるかを机上試験で問われます。実機での試験は今のところないとされています。
机上試験
1等ライセンス基本の試験の机上試験では、立入管理措置なしで昼間に目視内飛行を行える知識をもっているかが問われます。
飛行計画の作成
昼間の目視内、立入管理措置なしで行う模擬飛行計画が試験員より提示され、飛行計画の作成において留意が必要な事項について、受験者が理解しているかどうか質問されます。
- 航空法等の遵守
- 安全確保、事故の予防、緊急時の対応
- 機体の使用の条件、限界事項
- 自動飛行機能の設定(自動飛行する経路、危機回避機能の設定等)
判定基準
- 誤答なし
- 必要な内容について示している
- 制限時間以内に回答
口述試験(飛行前点検)
1等ライセンス基本の試験、口述試験では飛行前点検について理解し点検を行えるかが問われます。
作動前の機体点検
動作させる前の機体を実際に点検し点検結果を答える。
- 各機器が確実に取り付けられているか。(ネジ、コネクター等の脱落やゆるみ等)
- 機体プロペラ、フレーム、機体識別票等)の外観に損傷、ゆがみ等がないか。
- 燃料の搭載量又はバッテリーの残量は十分か。
- 送信機の操縦モード設定は意図したモードか。
判定基準
- 点検の漏れやミスなく正確な点検を行うこと
飛行空域及び周囲の確認
飛行場所と周辺の確認を行う
- 飛行空域及びその周辺の状況に問題はないか。
- 航空法等の違反はないか。
- 必要な許可証又は承認証を携帯しているか。
- 操縦者の体調等に問題はないか。
- 気象状況に問題はないか。
判定基準
- 確認の漏れやミスなく正確な確認を行えること
作動点検
作動点検に関する事項について機体と送信機を作動し点検を行う
- 機体の電源投入時に、送信機が起動済みであるか。
- 発動機やモーターに異音がないか。
- 機体と送信機の通信が正常であるか。
- リモートID機能の作動が正常であるか(リモートID非搭載機の場合は、リモートIDが正常に作動していると仮定し、リモートIDが正常に作動している旨の点呼を行う。)。
- 機体を離陸地点直上でホバリングさせた状態で、ラダー、エルロン、エレベーター、スロットルの操作を行い、機体が正常に作動するか。(作動点検に関する事項の確認後、機体を着陸させる。)
判定基準
- 確認の漏れ、ミスなく正確な点検を行うことができる。
実技試験
1等ライセンス基本の試験、実技試験では立入管理措置なしで昼間飛行と目視内飛行を行える操縦能力があるかが判定されます。
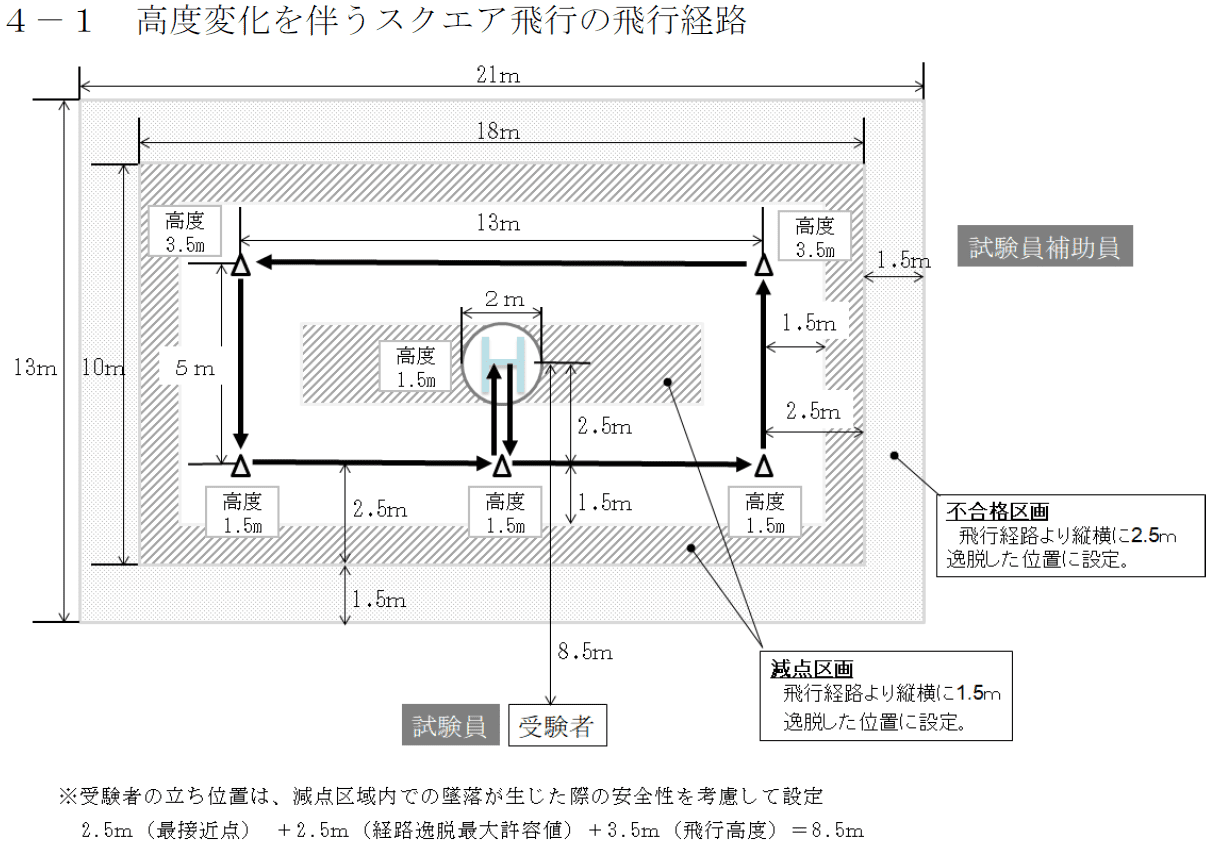
高度変化を伴うスクエア飛行
- GNSS OFF、ビジョンセンサーOFFで機体は機首を前方に向けて離陸、高度1.5mまで上昇し、5秒間ホバリング
- 機首は常に進行状態を向いた状態で高度を変化(1.5m→3.5m→1.5m)させながら四角に移動
- 移動完了後、着陸
判定基準
- 試験員の指示通りの飛行経路と手順であること
- 飛行経路を維持でき、飛行経路から1.5m以上のズレがないこと
- 操作は柔軟円滑で急激な操作を行わないこと
- 飛行経路と高度が大きくふらつかないこと
- 適切な速度を保てていること
- 所定の範囲で安定したホバリングができること
- 所定の範囲に安全な着陸を行うことができること
- 制限時間以内に飛行を完了させること

解説
高度変化を伴いますのでエレベーターを入力しながらスロットルを入力します。
円滑に操作を行うことも判定基準となりますので速度を一定にし、飛行経路からズレないようにすることを心掛けましょう。
1等ライセンスの実地試験の実技は外で行うことが義務付けられています。
そのため天候の影響をうけやすく、2等ライセンスと比較すると難易度が高くなることが想定されます。
風で流され飛行経路からズレないよう、エレベーターとエルロンで補正しましょう。
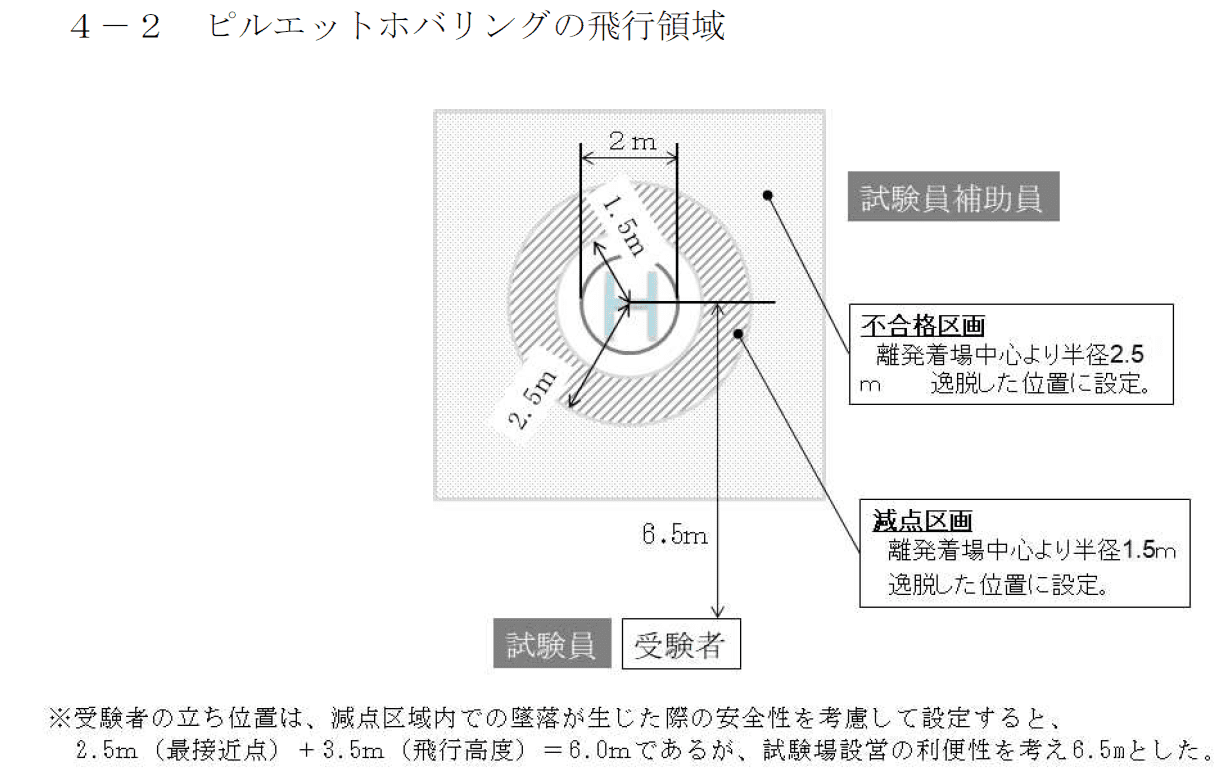
ピルエットホバリング
- GNSS OFF、ビジョンセンサーOFFの状態で機首を前方にむけ離陸、高度3.5mまで上昇し5秒間ホバリング
- 離陸地点で試験員の指示する方向に20秒間で1回転する回転速度で回転を行う
- 1回転後、着陸
判定基準
- 試験員の指示通りの飛行手順であること
- 所定のホバリング位置を維持でき、離発着地点の中心から1.5m以上のズレがないこと
- 操作は柔軟かつ円滑であり、急激な操作を行わないこと
- 機体の姿勢、高度が大きくふらつかないこと
- 所定の回転速度を保つことができること。回転を停止させることがないこと。
- 所定の範囲で安定したホバリングを行うことができること
- 所定の範囲に安全な着陸を行うことができること。
- 制限時間以内に飛行を完了させること。
解説
ピルエットホバリングはどの機体を使うかにより難易度が大きく変化します。
1等ライセンスの場合は高さ3.5mでGNSSとビジョンセンサーがOFFの状態で行います。
ヨーで旋回しつつ、エレベーターやエルロンで機体を中央に固定することを意識しましょう。
20秒以上かけて1回転を行わないといけないため、モード1であればヨーをいれつつエレベーターを入力する訓練、モード2であればエルロンをいれつつエレベーターを入力する訓練を行います。
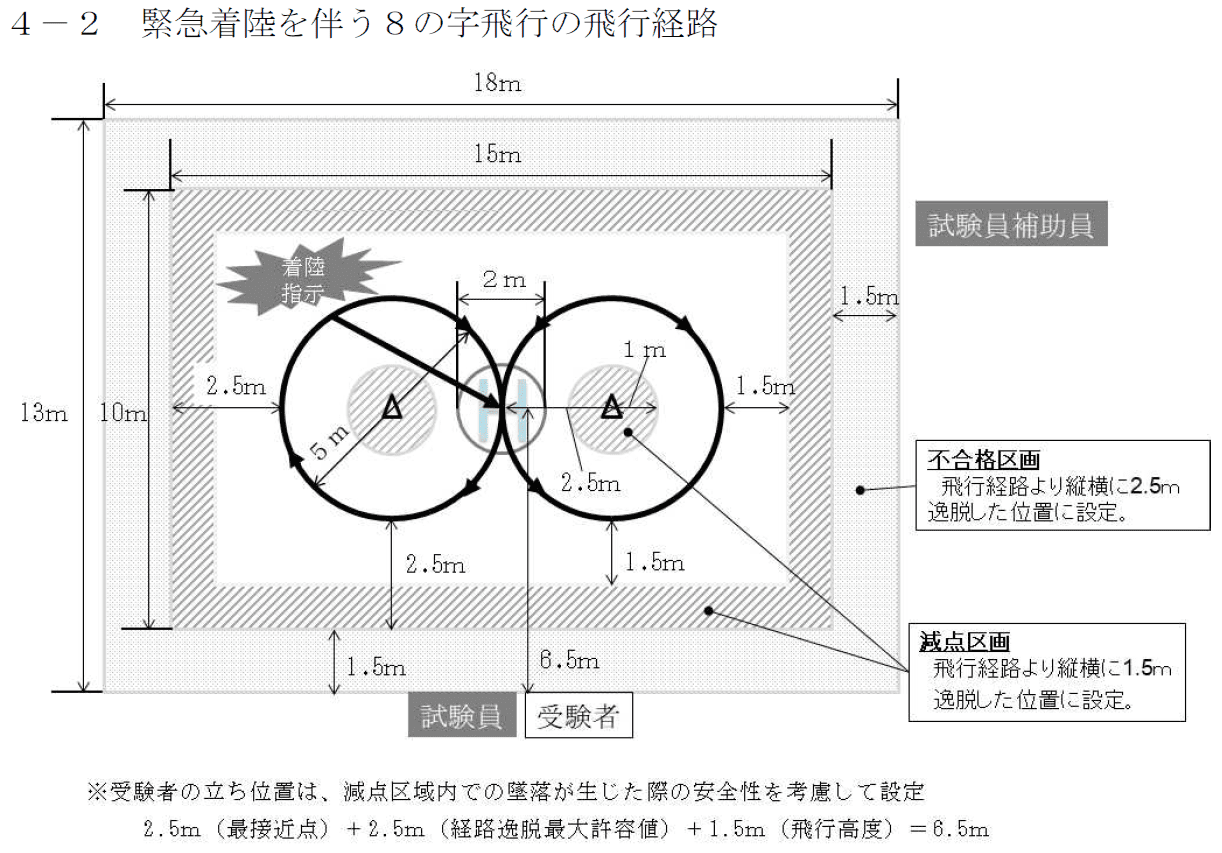
緊急着陸を伴う8の字飛行
- GNSSとビジョンセンサーOFFの状態で機首を前方にむけて離陸し高度1.5mで5秒間ホバリング
- 機首を進行方向に向けた状態で8の字飛行を連続で行う。円直径は約5m程度とする。
- 試験員からの緊急着陸を行う旨の口述指示があり次第、8の字飛行を中断し、最短のルートで指定された着陸地点に着陸を行う。
判定基準
- 試験員の指示通り飛行経路及び手順であること。
- 所定の飛行経路を維持でき、飛行経路から1.5m以上のズレがないこと。
- 操作を柔軟円滑であり、急激な操作を行わないこと。
- 飛行経路及び高度が大きくふらつかないこと。
- 適切な速度を保つことができること。機体を停止させて旋回させることがないこと。
- 所定の範囲で安定したホバリングを行うことができること。
- 所定の範囲に安全な着陸を行うことができること。
- 所定の制限時間以内に、飛行を完了させること。
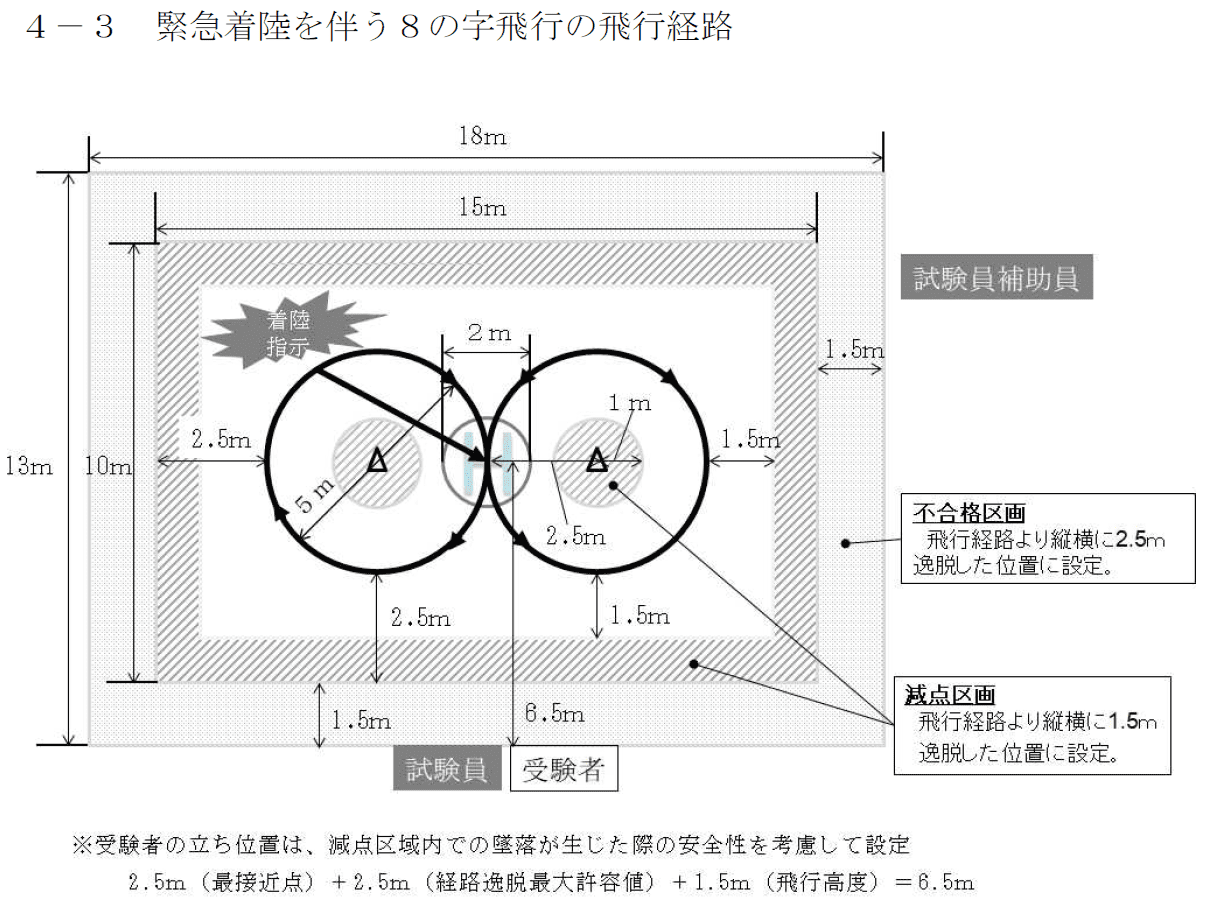
8の字を飛行している最中に、試験員から合図があったら離陸地点に着陸します。
このとき、機体を停止させて旋回すると不合格となります。
ですから機体を停止させずに素早く着陸地点に戻し、着陸させることが求められます。
着陸の際に機体が正面を向いている必要はありませんので、そのまま着陸させたらよいでしょう。
ちなみに着陸までの所要時間(○秒以内に着陸など)は明文化されていません。
口述試験(飛行後の点検と記録)
口述で飛行後の点検と記録を適切に行うことができるかが判定されます。
飛行後点検
飛行後の点検項目を受験者に示し点検結果を答えさせる。
- 各機器が確実に取り付けられているか。(ネジ、コネクター等の脱落やゆるみ等)
- 機体(プロペラ、フレーム、機体識別票等)の外観、損傷、ゆがみ等がないか。
- 各機器の異常な発熱はないか。
- 機体へのゴミ付着等、そのほかの外観異常はないか。
- 操縦時に異常はなかったか。特に、発動機やモーター、機体と送信機の通信、機体の制御に異常はなかったか。
判定基準
- 点検の漏れ又は誤りがなく、正確な点検を行うことができること。
飛行後の記録
実技試験の飛行後に、飛行日誌(飛行記録、日常点検記録又は点検整備記録)に記載する内容を口述で答えさせ、又は所定の様式に記述させる。
判定基準
- 記載の漏れ又は誤りがなく、正確な記録を行うことができること。
口述試験(事故、重大インシデントの報告)
事故、重大インシデント発生時の報告と対応について、適切に行うことができるかどうかが判定されます。
事故及び重大インシデントの説明
事故及び重大インシデントにあてはまる項目と、事故などが発生したときの対応について問い、口述もしくは記述にて説明させる。
判定基準
- 説明の漏れ又は誤りがなく、正しい説明を行うことができること。
1等ライセンス昼間飛行の限定変更に係る実地試験
昼間飛行の限定変更に係る実地試験では、立入管理措置を講ずることなく行う夜間飛行を安全に実施するための知識と能力があるか試験を通じて確認されます。
自動操縦については、適切な飛行経路の設定や危機回避機能(フェールセーフ機能)の設定を行うために十分な知識があるかを机上試験で問われます。実機での試験は今のところないとされています。
実地試験は25kg未満のドローンで行います。
机上試験
1等ライセンス昼間飛行の限定変更に係る実地試験の机上試験では、立入管理措置なしで昼間に夜間飛行を行える知識をもっているかが問われます。
飛行計画の作成
立入管理措置がない状態で行う夜間飛行の模擬飛行計画を試験員より提示され、飛行計画の作成において留意が必要な事項について、受験者が理解しているかどうか質問されます。
判定基準
- 誤答なし
- 必要な内容について示している
- 制限時間以内に回答
口述試験(飛行前点検)
1等ライセンス昼間飛行の限定変更に係る実地試験の口述試験では、飛行前の点検を適切に行うことができるかが問われます。
作動前の機体点検
起動前の機体の点検項目を受験者に示し、受験者は点検結果を答えます。
- 各機器が確実に取り付けられているか(ネジ、コネクター等の脱落やゆるみ等)
- 機体プロペラ、フレーム、機体識別票等の外観に損傷、ゆがみ等はないか。
- 燃料の搭載量またはバッテリーの残量は十分か。
- 送信機の操縦モード設定は意図したモードか。
判定基準
- 点検の漏れや誤りがなく、正確な点検を行うことができること
飛行空域及び周囲の確認
飛行空域とその周辺の確認事項を受験者に示し、受験者は結果を答えます。
- 飛行空域及びその周辺の状況に問題はないか。
- 航空法等の違反はないか。
- 必要な許可証または承認証を携帯しているか。
- 操縦者の体調等に問題はないか。
- 気象状況に問題はないか。
判定基準
- 確認の漏れ又は誤りがなく、正確な確認を行うことができること。
作動点検
作動点検に関する事項を受験者に示し、機体及び送信機を作動させて点検し、結果を答える。
- 機体の電源投入時に、送信機が起動済みであるか。
- 発電機やモーターに異音がないか。
- 機体と送信機の通信が正常であるか。
- リモートID機能の作動が正常であるか(リモートID非搭載機の場合は、リモートIDが正常に作動していると仮定し、リモートIDが正常に作動している旨の点呼を行う。)
- 機体を離陸地点直情でホバリングさせた状態で、ラダー、エルロン、エレベーター、スロットルの操作を行い、機体が正常に作動するか。
判定基準
- 確認の漏れ又は誤りがなく、正確な点検を行うことができること。
実技試験
実技試験では立入管理措置なしで夜間飛行に係る操縦能力があるかどうかが判定されます。
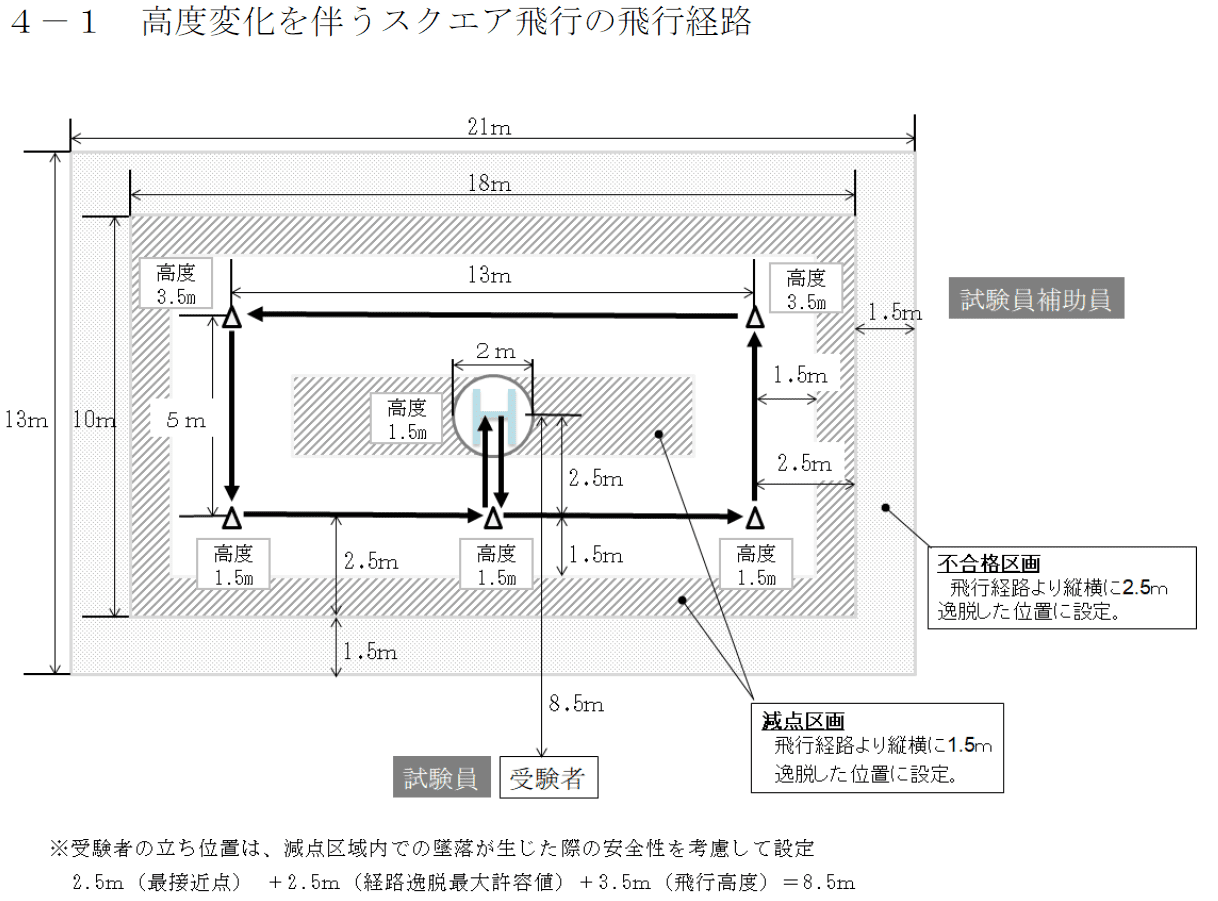
高度変化を伴うスクエア飛行
- GNSSとビジョンセンサーoffの状態で機首を前方に向けて離陸し、高度1.5mまで上昇し、5秒間ホバリングを行う。
- 試験員が口述で指示する飛行経路及び手順で直線上に飛行する。機体の機首は常に進行方向を向いた状態で移動する。受験者からみて縦方向の移動は1.5mから3.5mまでの高度変化を伴う。
- 移動完了後、着陸を行う。
判定基準
- 試験員の指示通りの飛行経路及び手順であること。
- 所定の飛行経路を維持でき、飛行経路から1.5m以上の逸脱がないこと。
- 操作は柔軟円滑であり、急激な操作を行わないこと。
- 飛行経路及び高度が大きくふらつかないこと。
- 適切な速度を保つことができること。
- 所定の範囲で、安定したホバリングを行うことができること。
- 所定の範囲に安全な着陸を行うことができること。
- 制限時間以内に飛行を完了させること。
解説
ドローンの操作は基本に係る実地試験と同様です。
しかし限定変更の実地試験は150ルクス以下の環境で行われるため、基本的には日没以降に実施されます。
機体に搭載されたLEDの光を頼りに機体の位置や向きを把握する必要があります。
日本で流通しているドローンの多くは前方に赤LEDが搭載されているため、日頃から意識しておくとよいでしょう。
緊急着陸を伴う8の字飛行
- GNSSとビジョンセンサーoffの状態で機首を前方に向けて離陸し、高度1.5m以上まで上昇、5秒間ホバリングを行う。
- 機体の機首を進行方向に向けた状態の8の字飛行を連続して行う。8の字の円直径は約5m。
- 試験員から緊急着陸を行う旨の指示があったら、飛行を中断し、最短で指定された着陸地点への着陸を実施。
判定基準
- 試験員の指示通りの飛行経路及び手順であること
- 所定の飛行経路を維持でき、飛行経路から1.5m以上の逸脱がないこと
- 操作は柔軟円滑であり、急激な操作を行わないこと。
- 飛行経路及び高度が大きくふらつかないこと。
- 適切な速度を保つことができること。機体を停止させて旋回させることがないこと。
- 所定の範囲で、安定したホバリングを行うことができること。
- 所定の範囲に安全な着陸を行うことができること。
- 所定の制限時間以内に飛行を完了させること。
解説
こちらもドローンの操作は基本に係る実地試験と同様です。しかしLEDで機体の位置や向きを把握し8の字飛行を行うのはある程度の難易度が予想されます。規程の飛行経路から1.5m以上逸脱してしまうと減点の対象となります。8の字飛行中にドローンは操縦者から約9m程度離れることもあります。旋回するときの機体の向きをLEDで把握する必要があります。しっかり訓練しておきましょう。判定基準の1つに「操作は柔軟円滑であり、急激な操作を行わないこと。」があります。定性的ですが、カクカクした動きや途中で停止せずにスムーズに旋回することが求められるでしょう。
1等ライセンス目視内飛行の限定変更に係る実地試験
目視内飛行の限定変更に係る実地試験では、立入管理措置なしで目視外飛行を、安全に実施するための知識と能力があるか試験を通じて確認されます。
自動操縦については、適切な飛行経路の設定、危機回避機能(フェールセーフ機能)の設定を行うために十分な知識があるかを机上試験で問われます。実機での試験は今のところないとされています。実地試験は25kg未満のドローンで行います。
机上試験
1等ライセンス目視内飛行の限定変更に係る実地試験の机上試験では、立入管理措置なしで目視外飛行を行える知識をもっているかが問われます。
飛行計画の作成
試験員より立入管理措置なしで行う目視外飛行の模擬飛行計画を提示。飛行計画の作成において留意が必要な事項について、受験者が理解しているかどうかを判定可能な質問を行い、答えさせる。
- 航空法等の遵守
- 安全確保、事故の予防、緊急時の対応
- 機体の使用の条件、限界事項
- 自動飛行機能の設定(自動飛行する経路、危機回避機能の設定等)
判定基準
- 誤答なく、必要な事項について留意できることを示す回答であること。
- 制限時間以内に回答できること。
口述試験(飛行前点検)
1等ライセンス目視内飛行の限定変更に係る実地試験、口述試験では飛行前点検について理解し点検を適切に行うことができるかが問われます。
作動前の機体点検
作動前の機体の点検項目を受験者に示し、受験者に点検結果を答えさせる。
- 各機器が確実に取り付けられているか。(ネジ、コネクター等の脱落やゆるみ等)
- 機体プロペラ、フレーム、機体識別票等の外観に損傷、ゆがみ等ないか。
- 燃料の搭載量又はバッテリーの残量は十分か。
- 送信機の操縦モード設定は意図したモードか。
判定基準
- 点検の漏れ又は誤りがなく、正確な点検を行うことができること。
飛行空域及び周囲の確認
飛行空域及びその周辺の確認事項を受験者に示し、結果を答えさせる。
- 飛行空域及びその周辺の状況に問題はないか。
- 航空法等の違反はないか。
- 必要な許可証または承認証を携帯しているか。
- 操縦者の体調等に問題はないか。
- 気象状況に問題はないか。
判定基準
- 確認の漏れ又は誤りがなく、正確な確認を行うことができること。
作動点検
作動点検に関する事項を受験者に示し、機体と送信機を作動させて点検させ、その結果を答えさせる。
- 機体の電源投入時に、送信機が起動済みであるか。
- 発動機やモーターに異音がないか。
- 機体と送信機の通信が正常であるか。
- リモートID機能の作動が正常であるか(リモートID非搭載機の場合は、リモートIDが正常に作動していると仮定し、リモートIDが正常に作動している旨の点呼を行う。)
- 機体を離陸地点直上でホバリングさせ、ラダー、エルロン、エレベーター、スロットルの操作を行い、機体が正常に作動するか。
- 機体に搭載したカメラを操作し、カメラ画像やカメラの挙動に異常はないか。(作動点検に関する事項の確認後、機体を着陸させる。)
判定基準
- 点検の漏れや誤りがなく、正確な点検を行うことができること。
実技試験
1等ライセンス目視内飛行の限定変更に係る実地試験の実技試験では、立入管理措置なしで目視外飛行を行える操縦能力があるかが判定されます。
高度変化を伴うスクエア飛行
- GNSS、ビジョンセンサーをonの状態で、目視内で機首を前方に向けて離陸を行い、高度3.5mまで上昇し、5秒間ホバリングを行う
- 受験者は試験員の指示で後ろ向きになり、機体が見えないようにする
- 受験者はカメラ画像のみで試験員が口述で指示する飛行経路と手順で直線上に飛行する。機体の機首は常に進行方向を向いた状態で移動する。受験者からみて縦方向の移動は、1.5mから3.5mまでの高度変化を伴う
- 移動完了後、着陸を行う。
判定基準
- 試験員の指示通りの飛行経路と手順であること。
- 移動先をカメラ画像で確認しながら移動ができること。
- 所定の飛行経路を維持できること。
- 操作は柔軟円滑であり、急激な操作を行わないこと。
- 飛行経路及び高度が大きくふらつかないこと。
- 適切な速度を保つことができること。
- 所定の範囲で、安定したホバリングを行うことができること。
- 所定の範囲に安全な着陸を行うことができること。
- 所定の制限時間以内に、飛行を完了させること。
解説
スクエア飛行を目視外飛行で行います。
目視外飛行の場合、カメラの映像やUIをみながら飛行を行います。
カメラ目線で操縦するため、人によっては目視内飛行よりも簡単に感じるかもしれません。
機体に操縦者自身が乗っている目線で操縦できるからです。
縦に移動するときは高度変化を伴いますので滑らかに移動させることが必要です。
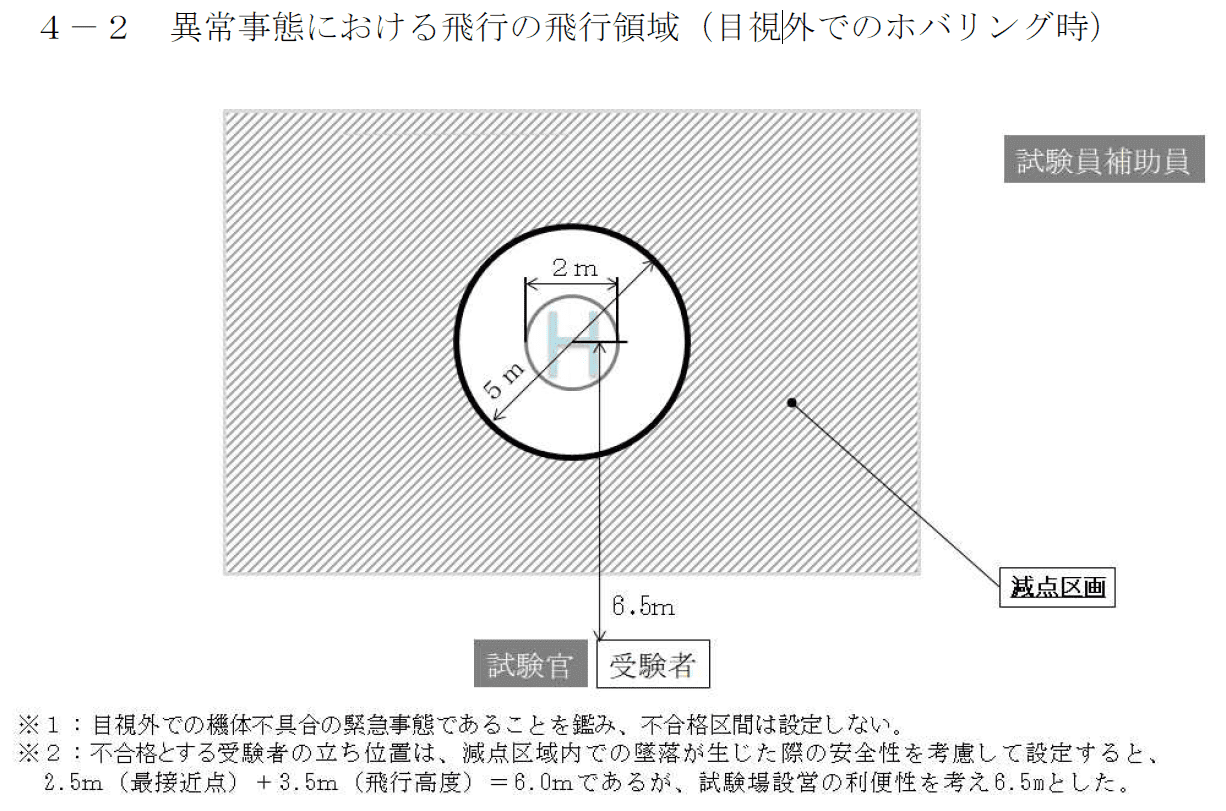
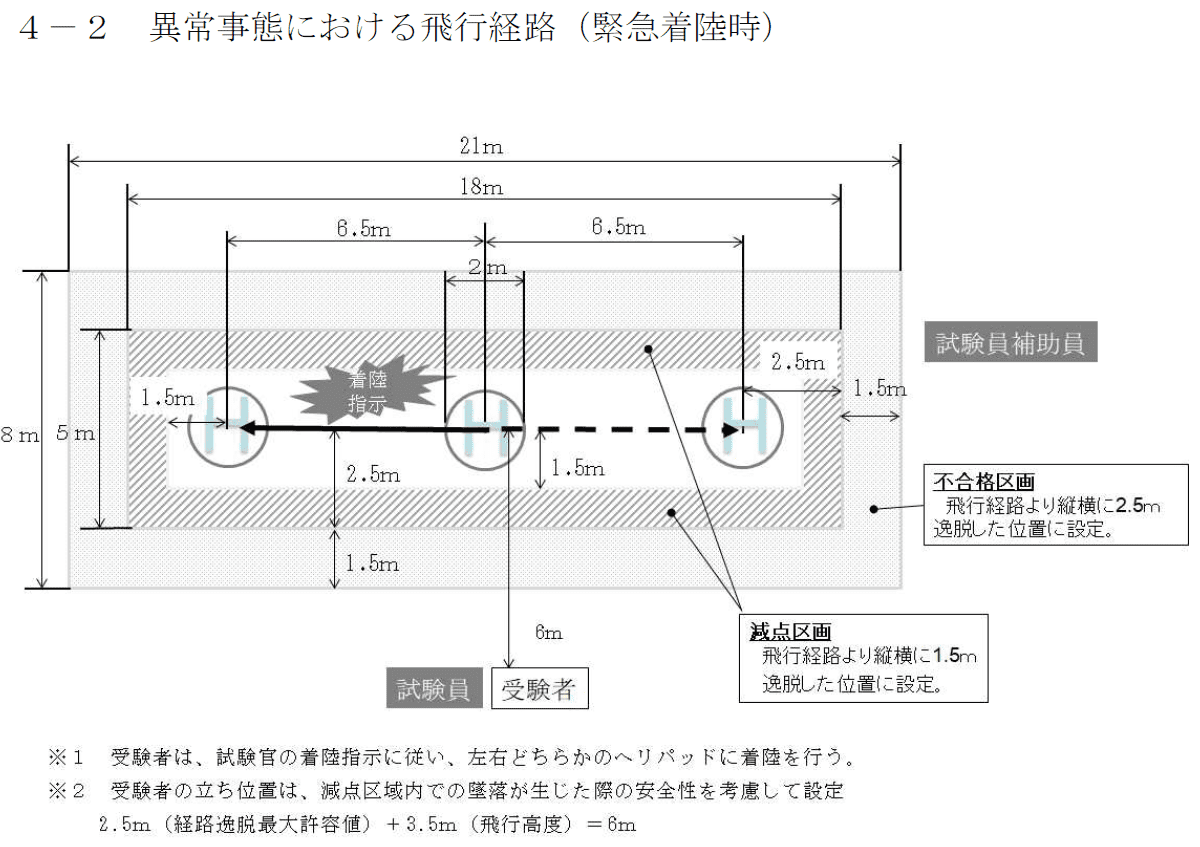
異常事態における飛行
- GNSS、ビジョンセンサーoffの状態で、目視内で機首を前方に向けて離陸を行い、高度3.5mまで上昇し、ホバリングを行う。
- ホバリング中に、離発着地点をカメラで確認できるようにする。
- 受験者はカメラ操作完了を試験員に伝える。
- 受験者は試験員の指示で後ろ向きになる。
- 10秒間目視外でホバリングを行う。
- ホバリング完了後、受験者は試験員から伝えられた緊急着陸地点をカメラで確認し、緊急着陸地点までの経路に障害物がないことを確認した上で、緊急着陸地点に移動する。
- 緊急着陸地点への移動完了後、障害物がないか確認した後、着陸を行う。
判定基準
- 試験員の指示通りの飛行経路及び手順であること。
- 離発着地点及び緊急着陸地点をカメラ画像で見失わないようにすること。
- 所定の範囲で、安定した目視外ホバリングを行うことができること。
- 所定の飛行経路を維持でき、飛行経路から1.5m以上の逸脱がないこと。
- 所定の範囲に安全な着陸を行うことができること。
- 所定の制限時間以内に、飛行を完了させること。
 解説
解説
目視内で機体をホバリングをした後、目視外でホバリング後に緊急着陸地点に着陸させます。
GNSSとビジョンセンサーをoffにしているので、機体が流れる状態での着陸となります。
緊急着陸地点は試験官の指示で決められます。
減点となる区間は飛行経路から1.5mと短く、カメラの映像と操縦にタイムラグがありますので、減点区画に入らないよう機体を制御する技能が求められるでしょう。
1等ライセンス最大離陸重量25kg未満の限定変更に係る実地試験
最大離陸重量25kg未満の限定変更に係る実地試験では、立入管理措置なしで最大離陸重量25kg以上の機体の飛行を安全に実施するための知識及び能力を有するかどうかを試験を通じて確認されます。
自動操縦については、適切な飛行経路の設定、危機回避機能(フェールセーフ機能)の設定を行うために十分な知識があるかを机上試験で問われます。実機での試験は今のところないとされています。実地試験は25kg以上のドローンで行います。
机上試験
立入管理措置を講ずることなく行う最大離陸重量25kg以上の機体の飛行に必要な知識を有するかどうかが判定されます。
飛行計画の作成と通報
試験員より立入管理措置なしで行う最大離陸重量25kg以上の機体の飛行についての模擬飛行計画を提示し、飛行計画の作成において留意が必要な事項について、受験者が理解しているかどうかを判定可能な質問を行い、答えさせる。
- 航空法等の遵守
- 安全確保、事故の予防、緊急時の対応
- 機体の使用の条件、限界事項
- 自動飛行機能の設定(自動飛行する経路、危機回避機能の設定等)
判定基準
- 誤答なく、必要な事項について留意できることを示す回答であること。
- 所定の制限時間以内に回答できること。
口述試験(飛行前点検)
飛行前点検について理解し点検を適切に行うことができるかが問われます。
作動前の機体点検
作動前の機体の点検項目を受験者に示し、受験者に点検結果を答えさせる。
- 各機器が確実に取り付けられているか。(ネジ、コネクター等の脱落やゆるみ等)
- 機体プロペラ、フレーム、機体識別票等の外観に損傷、ゆがみ等ないか。
- 燃料の搭載量又はバッテリーの残量は十分か。
- 送信機の操縦モード設定は意図したモードか。
判定基準
- 点検の漏れ又は誤りがなく、正確な点検を行うことができること。
飛行空域及び周囲の確認
飛行空域及びその周辺の確認事項を受験者に示し、結果を答えさせる。
- 飛行空域及びその周辺の状況に問題はないか。
- 航空法等の違反はないか。
- 必要な許可証または承認証を携帯しているか。
- 操縦者の体調等に問題はないか。
- 気象状況に問題はないか。
判定基準
- 確認の漏れ又は誤りがなく、正確な確認を行うことができること。
作動点検
作動点検に関する事項を受験者に示し、機体と送信機を作動させて点検させ、その結果を答えさせる。
- 機体の電源投入時に、送信機が起動済みであるか。
- 発動機やモーターに異音がないか。
- 機体と送信機の通信が正常であるか。
- リモートID機能の作動が正常であるか(リモートID非搭載機の場合は、リモートIDが正常に作動していると仮定し、リモートIDが正常に作動している旨の点呼を行う。)
- 機体を離陸地点直上でホバリングさせ、ラダー、エルロン、エレベーター、スロットルの操作を行い、機体が正常に作動するか。
- 機体に搭載したカメラを操作し、カメラ画像やカメラの挙動に異常はないか。(作動点検に関する事項の確認後、機体を着陸させる。)
判定基準
- 点検の漏れや誤りがなく、正確な点検を行うことができること。
実技試験
1等ライセンス最大離陸重量25kg未満の限定変更に係る実地試験の実技試験では、立入管理措置なしでドローンの飛行に関する操縦能力があるかが判定されます。
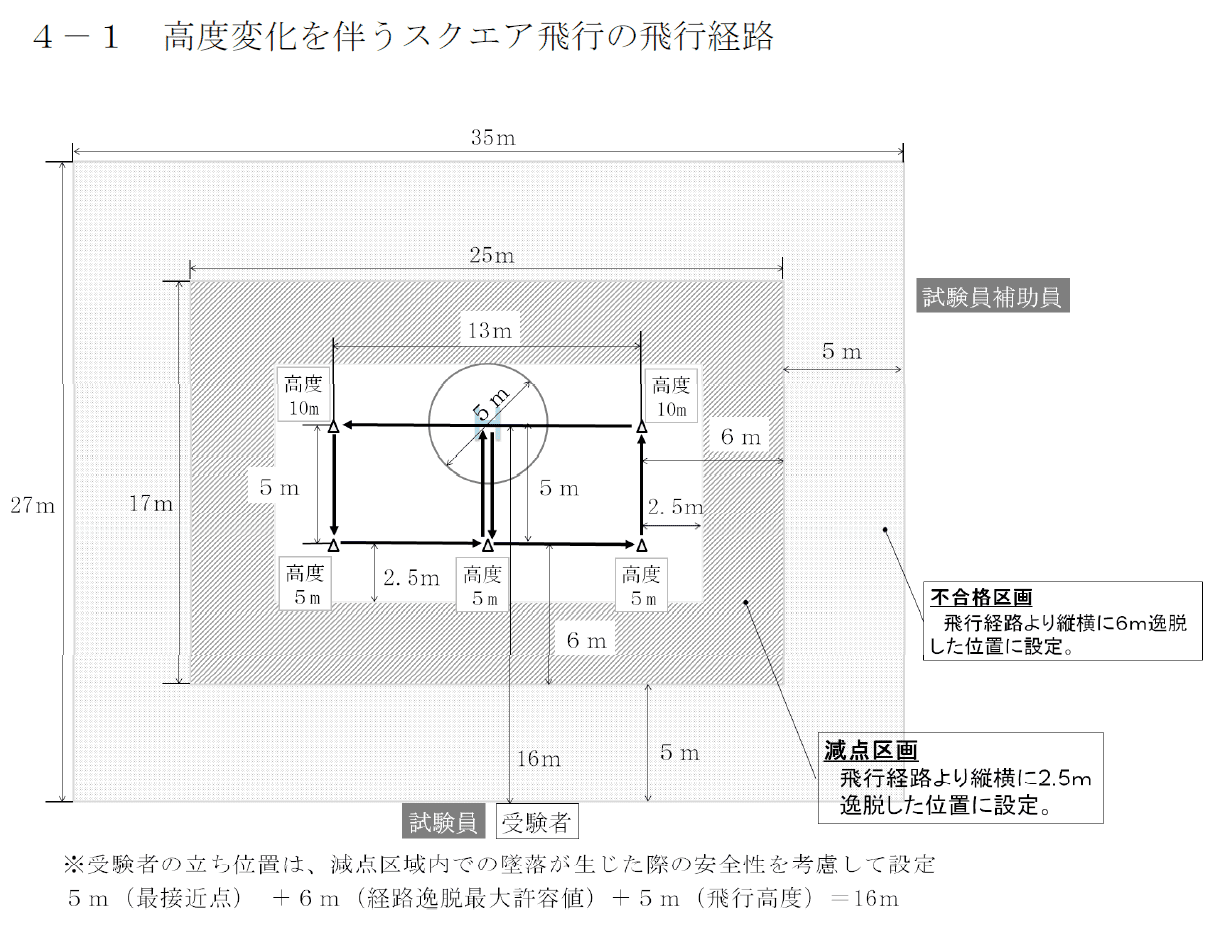
高度変化を伴うスクエア飛行
- GNSS、ビジョンセンサーをonの状態で、前方に向けて離陸を行い、高度5mまで上昇し、5秒間ホバリングを行う
- 試験員が口述で指示する飛行経路及び手順で直線上に飛行させる。機体の機首は常に進行方向を向いた状態で移動をする。受験者から見た右側と左側の縦方向移動は、飛行経路は5mから10mまでの高度変化を伴う。
- 移動完了後、着陸を行う。
判定基準
- 試験員の指示通りの飛行経路と手順であること。
- 所定の飛行経路を維持でき、飛行経路から2.5m以上の逸脱がないこと。
- 操作は柔軟円滑であり、急激な操作を行わないこと。
- 飛行経路及び高度が大きくふらつかないこと。
- 適切な速度を保つことができること。
- 所定の範囲で、安定したホバリングを行うことができること。
- 所定の範囲に安全な着陸を行うことができること。
- 所定の制限時間以内に、飛行を完了させること。
解説
スクエア飛行を25kg以上の機体で行います。
機体が大型になり、機体からは最大で16m程度離れた状態で飛行させるため、飛行経路から外れないよう操作する必要があります。
試験でどの機体を使用するかによりますが、定められた飛行経路から2.5mズレないように飛行させるのは意外と難しいです。
なぜなら受験者の位置から16m程度機体が離れていることと、高度を変化させる場所では斜めに見る形となるからです。
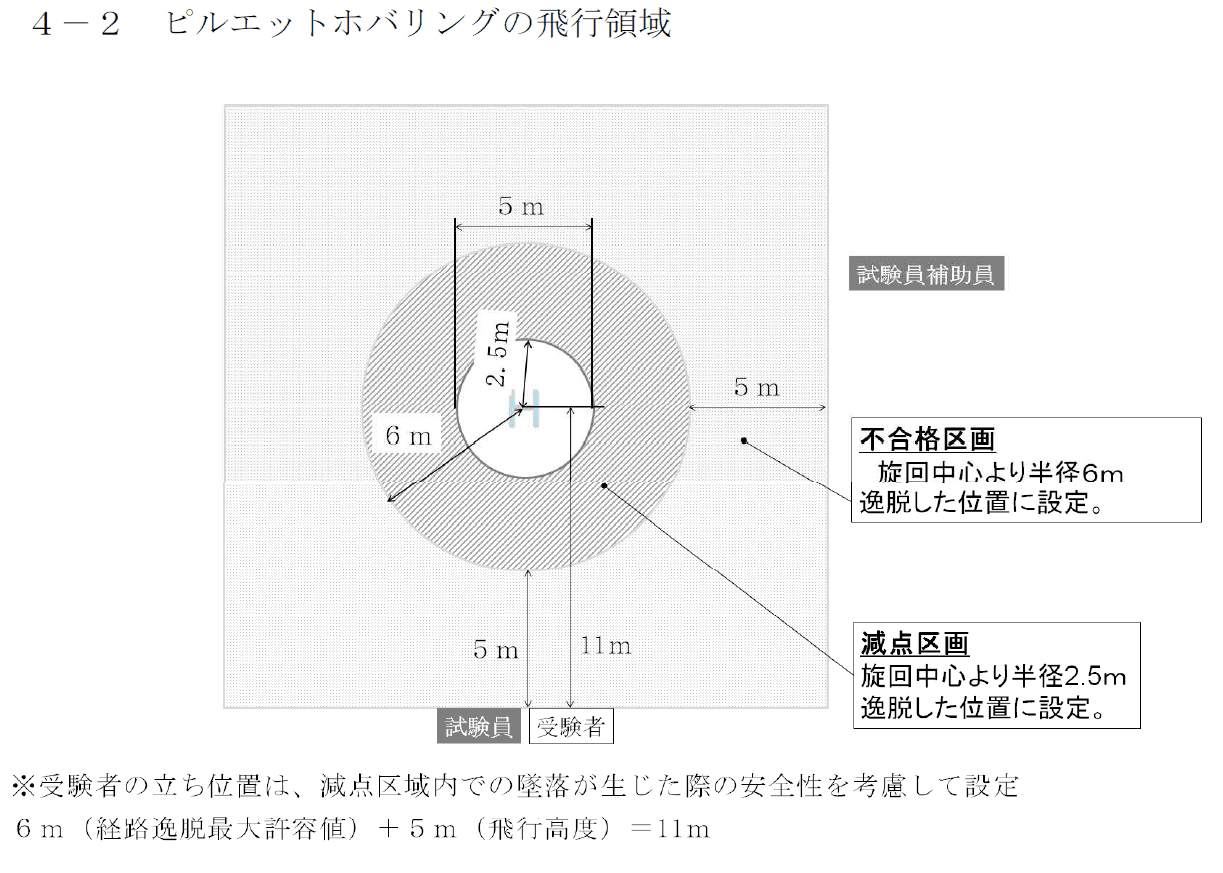
ピルエットホバリング
- GNSS、ビジョンセンサーoffの状態で、機首を前方に向けて離陸を行い、高度5mまで上昇して、5秒間ホバリングを行う。
- 離陸地点にて、試験員の指示する方向に20秒間で一回転する回転速度で回転を行う。
- 一回転後、着陸を行う。
判定基準
- 試験員の指示通りの飛行手順であること。
- 所定のホバリング位置を維持でき、離発着地点の中心から2.5m以上の逸脱がないこと。
- 操作は柔軟円滑であり、急激な操作を行わないこと。
- 機体の姿勢及び高度が大きくふらつかないこと。
- 所定の回転速度を保つことができること。回転を停止させることがないこと。
- 所定の範囲で、安定したホバリングを行うことができること。
- 所定の範囲に安全な着陸を行うことができること。
- 所定の制限時間以内に、飛行を完了させること。
解説
ピルエットホバリングはどの機体を使うかにより難易度が大きく変化します。
1等ライセンスの場合は高さ5mでGNSSとビジョンセンサーがOFFの状態で行います。
ヨーで旋回しつつ、エレベーターやエルロンで機体を中央に固定することを意識しましょう。
20秒以上かけて1回転を行わないといけないため、モード1であればヨーをいれつつエレベーターを入力する訓練、モード2であればエルロンをいれつつエレベーターを入力する訓練を行えばよいでしょう。
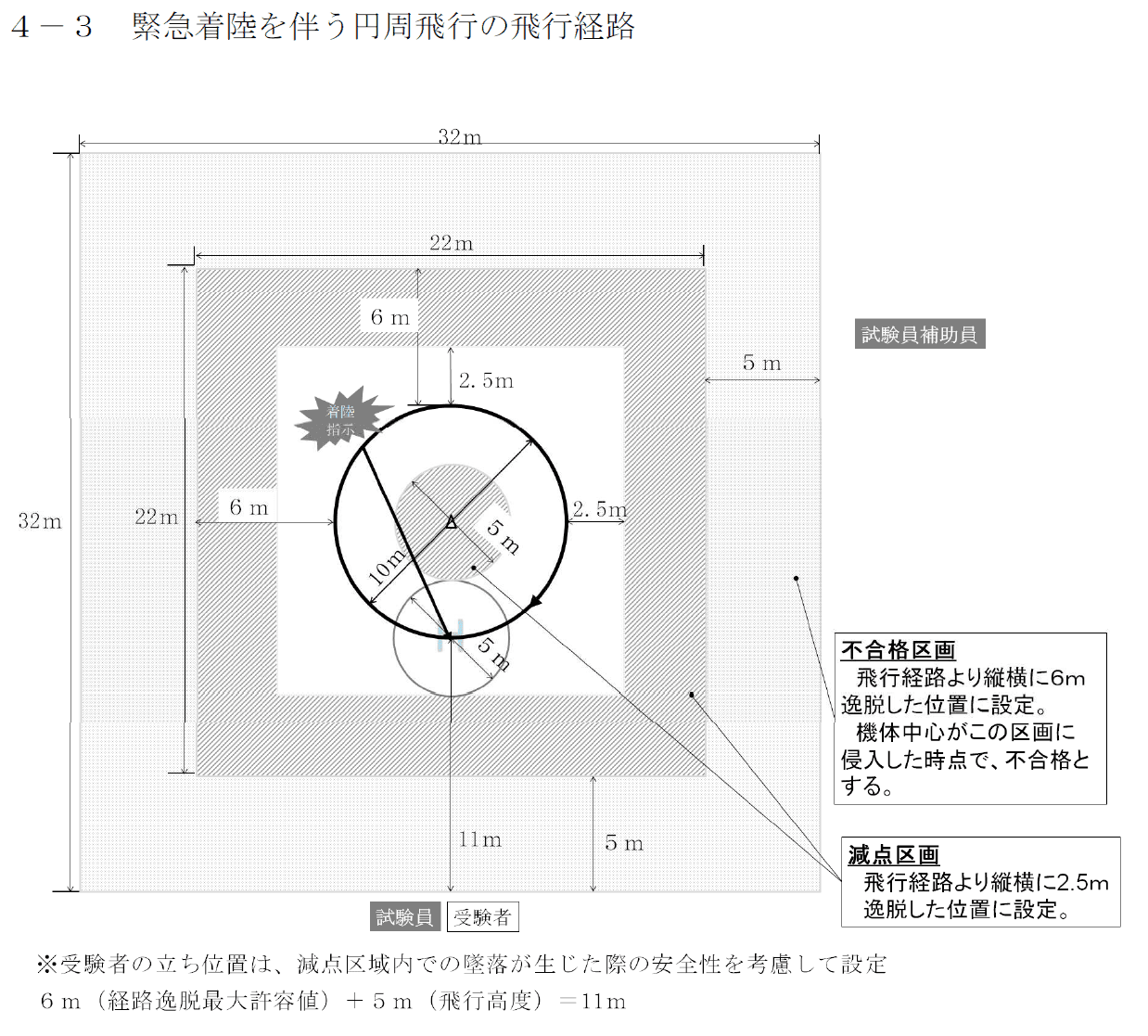
緊急着陸を伴う円周飛行
- GNSS、ビジョンセンサーoffの状態で、機首を前方に向けて離陸を行い、高度5mまで上昇して、5秒間ホバリングを行う。
- 機体の機首を進行方向に向けた状態の円周飛行を、連続し2週行う。
- 機首を逆方向に向け、逆方向の円周飛行を連続して2週行う。
- 試験員からの緊急着陸を行う旨の口述指示があり次第、飛行を中断し、最短のルートで指定された着陸地点への着陸を行う。円直径は約10mとする。
判定基準
- 試験員の指示通り飛行経路及び手順であること。
- 所定の飛行経路を維持でき、飛行経路から2.5m以上の逸脱がないこと。
- 操作は柔軟円滑であり、急激な操作を行わないこと。
- 飛行経路及び高度が大きくふらつかないこと。
- 適切な速度を保つことができること。機体を停止させて旋回させることがないこと。
- 所定の範囲で、安定したホバリングを行うことができること。
- 所定の範囲に安全な着陸を行うことができること。
- 所定の制限時間以内に飛行を完了させること。
解説
25kg未満の限定変更では、8の字ではなく円周飛行を行い試験員の指示で緊急着陸を行います。
機体が大きくなるため円周飛行中に飛行経路からズレないようエルロンで調整を行いましょう。
判定基準によると、機体を停止させた時点で失格となる可能性があります。
そのためヨーで旋回をしつつ、エレベーターでスピードの調整を行い、エルロンで飛行経路上にのせることを意識しましょう。
まとめ
以上、ドローン免許(1等ライセンス)の実地試験について解説しました。
免許を取得することで、現在の法規制では国交省への許可・承認が必要だった飛行態様で条件を満たせば許可・承認が必要なくなります。
これはドローンを活用する上では大きなメリットと言えるでしょう。
レベル4での仕事を視野にいれて免許を取得したり、これからドローンの民間資格や国家資格を取得しドローン業界に転職するなど、選択肢が増えたのは私達にとって非常に喜ばしいことです。
とはいえ、ドローンの登録制度やドローンに関連する規制などがイマイチよくわからないということもあるかと思います。そんな方には無料体験会がおすすめです。
私達の学校では第一線で活躍しているインストラクターの現場の生の声を聞くことができる無料体験会を実施しています。
無料体験会では空撮用のドローンや講習用のドローンを操縦体験することができ、ドローンの規制や活用用途、今後の展望などについてもご紹介しています。無料で参加できますのでぜひお越しください。